
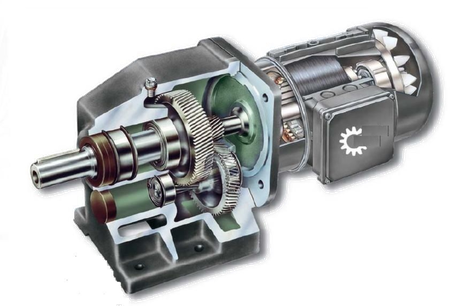
Les Engrenages à Axes parallèles et denture hélicoïdale
Rapport des Vitesses
Le RAPPORT des vitesses est généralement désigné par "r". Il est parfois désigné par "k" ou "ρ" (Rho).

Considérons l'engrènement ci-dessus de deux roues dentées à axes parallèles et denture hélicoïdale (1) et (2).
Qu'il s'agisse de denture droite ou hélicoïdale, la règle de condition de non glissement entre les roues (1) et (2) reste applicable, c'est pourquoi le calcul du Rapport des Vitesses (Rapport de Transmission) reste, lui aussi, INCHANGÉ, soit:

L'aboutissement à ce résultat est consultable là !
Remarque et rappel
Il est préférable de prendre l'habitude d'écrire que:

Avec:
- "s" désignant la Sortie;
- "e" désignant l'Entrée.
Représentations
Modèle 3D

Dessin technique

Schéma

Avantages & Inconvénients
Les engrenages cylindriques à axes parallèles et denture hélicoïdale ont un engrènement plus progressif que les engrenages à axes parallèles et denture droite. De ce fait, ils réduisent notablement les bruits et vibrations engendrés durant l’engrènement.
Ci-dessous, un aperçu de l'amélioration de l'engrènement expliquée en classe via copies d'écran de la modélisation 3d sur SolidWorks 2018.

Continuité de l'engrènement
Image ombrée
Lignes cachées supprimées
Lignes cachées apparentes




Efforts dans la denture
L’inclinaison de l’effort entre les dentures, du fait de l’hélice, engendre un effort axial durant l’engrènement.
Quelles sont ses conséquences? Réponse(s) en classe !
Veuillez trouver ci-dessous une analyse géométrique de l'engrènement et des efforts engendrés.
Etape 1:
Considérons l'engrenage ci-dessous = Pignon (1) et Roue (2).

Etape 2:
Enlevons le Pignon (1) pour mieux voir la Roue (2), laquelle transmet une action mécanique supposée en un pt.

Etape 3:
Voici l'action mécanique "F" de la Roue (2) sur le Pignon (1), un vecteur "FORCE" (ou EFFORT).

Etape 4:
Ajoutons maintenant le plan tangent au cercle primitif (non représenté) pour des projections orthogonales à venir...
Le point A constitue le point de tangence.

Etape 5:
Projetons la Force F sur ce plan, nous obtenons la composante normale "Fn" (a = angle de pression).
La projection de la Force F sur le côté "opposé" donne "Fr", la composante radiale (Force radiale).

Etape 6:
Travaillons désormais sur le Plan tangent et projetons orthogonalement la Force normale "Fn" de manière à obtenir deux composantes perpendiculaires, soient:
- "Ft", la Force tangentielle;
- et "Fa", la Force axiale.

Etape 7:
Expression algébrique des 3 composantes en fonction des angles a et b.
- D'après l'étape 5:
Fn = F cos a et Fr= F sin a
- D'après l'étape 6:
Ft = Fn cos b et Fa = Fn sin b
- Ainsi, en remplaçant Fn par F cos a, nous obtenons:
Ft = F cos a cos b et Fa = F cos a sin b
Etape 8:
Rappel de l'expression des 3 composantes de F:
- Ft = F cos a cos b
- Fa = F cos a sin b
- Fr = F sin a
Dimensions
Comme pour les roues à denture droite, les dimensions d’une roue à denture hélicoïdale sont déterminées à partir de deux valeurs:
- le module normalisé, appelé ici module normal (mn) ou module réel (mr);
- le nombre de dents Z.
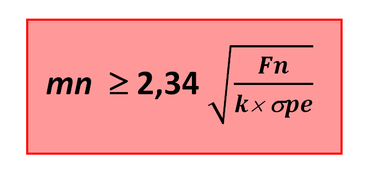
Le module (mn) est issue d'un calcul de RDM (rappel ici !), tandis que le nombre de dents "Z" est calculé à partir de la formule:
d = mt × Z
avec: d = diamètre primitif et mt = module apparent
Il existe donc une relation entre mn et mt, exprimons là en s'aidant d'une vue "développée" d'un pignon !
Aperçu 3d d'un pignon

Aperçu 2d en vue de dessus d'un pignon

Développée d'un pignon (vue de dessus)

Tout d'abord, rappelons l'expression du pas (P) d'une denture droite:
P = p x m
On peut donc écrire que:
Pn = p x mn
De même que:
Pt = p x mt
Avec la relation géométrique suivante extirpée de la représentation zoomée et retournée ci-contre, nous constatons que:
Pn = Pt x cos b
Donc:
p x mn = p x mt x cos b
Soit:
mn = mt x cos b
ZOOM de la Développée d'un pignon (vue de dessus)

ZOOM retourné (vue de dessus)

Compensation de l'effort axial

Roues à chevrons
2 dentures hélicoïdales sont taillées en sens inverse sur la même roue. Ces roues ont donné le sigle des usines Citroën, de la société des engrenages Citroën exploitant un brevet Polonais sur la taille des engrenages à chevrons en 1913.
Roues accolées à denture inversée
Les roues sont fixées entre-elles, un positionnement angulaire précis entre les deux roues accolées doit être réalisé.

Inclinaison des dentures sur les arbres intermédiaires des réducteurs:
Les dentures sur les arbres intermédiaires doivent être inclinées de manière à compenser l'effet néfaste de la composante axiale (ci-contre, l'exemple d'un motoréducteur).
Module

Toutes les caractéristiques des dentures droites se retrouvent dans le profil réel. Les calculs détaillés relatifs au module normal (mn) restent applicables à condition :
- D’appeler mn ( ou mr ) le module réel trouvé ;
- De tenir compte de l’angle d’hélice b pour évaluer la composante Fn (agissant perpendiculairement au profil de la dent (voir ci-contre).
Rappelons que la composante tangentielle Ft s’obtient à partir de la relation:

Expression de Fn

Le module normal a finalement pour expression :
Petit rappel sur les écritures !!!


Éléments de taillage
Définitions et relations à connaître

Détermination d'un Engrenage
Démarche conduisant au choix d’un engrenage à denture hélicoïdale
Veuillez trouver ci-dessous, un organigramme correspondant au différentes étapes d'un calcul de dimensionnement (et d'avant-projet) d'un engrenage, les données du problème étant souvent celles-ci:
-1- Paramètres moteur connus (P et N1);
-2- Vitesse de sortie souhaitée (N2);
-3- entraxe imposé (a).
Ci-après, une version téléchargeable !

Voici ce document au format "pdf" et téléchargeable ci-contre !
Exercices

Maintenant, place aux exercices !!!
Exercice 1: Détermination d'un engrenage à axes parallèles et denture hélicoïdale
Énoncé
Un moteur électrique tournant à 720 tr/min transmet une puissance de 3680 W à un arbre récepteur devant tourner à 240 tr/min.
Les roues dentées utilisées sont cylindriques à denture hélicoïdale et axes parallèles. On adoptera un angle d’inclinaison d’hélice b = 25°.
Pour le matériau, la Résistance pratique en extension est Rpe = 30 MPa ( fonte ).
L’entraxe a sera approximativement de 240 mm.
Quant au facteur de largeur k, il sera considéré égal à10.

Question
En application directe avec la démarche de dimensionnement d'un engrenage, déterminez le couple de roues dentées répondant au cahier des charges, c'est à dire les diamètres primitifs et leur nombre de dents.
Correction en classe !