
Robot Industriel
Mise en Situation
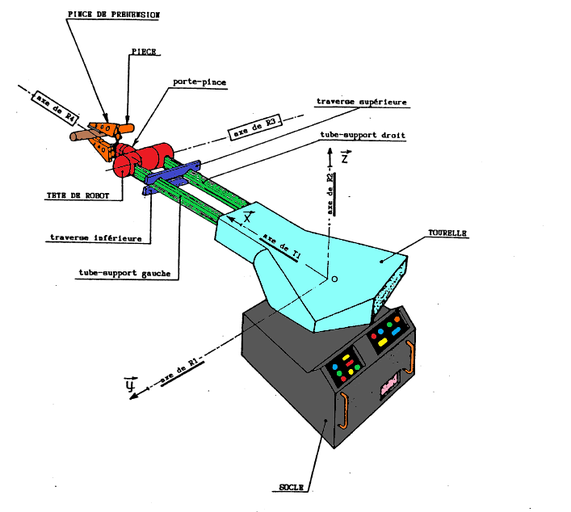
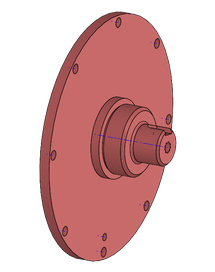
Considérons le Robot Industriel ci-contre dont la Tête (Tête de Robot) fait l'objet de notre étude.
Ce Robot permet de manipuler des pièces pour assurer:
- leur mise en position, dans le cas d'une chaîne de montage de véhicule;
- leur chargement et déchargement d'un poste de travail vers un autre.
Ce Robot possède 5 degrés de liberté, soient:
- R1: Rotation d'axe (O,y) de la Tourelle par rapport au Socle;
- R2: Rotation d'axe (O,z) de la Tourelle par rapport au Socle;
- T1: Translation rectiligne des Tubes-Support par rapport à la Tourelle;
- R3: Rotation de la partie centrale de la Tête de Robot par rapport aux Tubes-Support;
- R4: Rotation de la Pince de préhension par rapport au Porte-Pince de la Tête de Robot.
Plan d'Ensemble
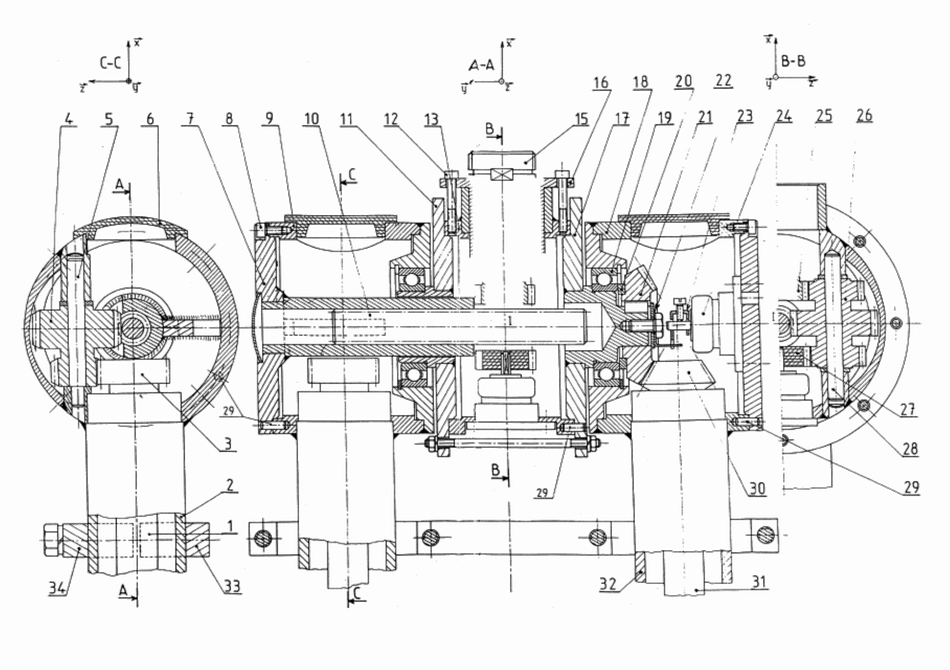
Plan téléchargeable
Nomenclature

Hypothèses & Données d'étude
- Notre étude se limite aux 2 Rotations R3 et R4;
- Le Repère R = (I, x, y , z) est lié aux Tubes-Support (2) et (32);
- le point I est à l'intersection de l'axe de rotation de l'Arbre Porte-Pince (15) et de l'axe de rotation du boitier Porte-Pince (16).
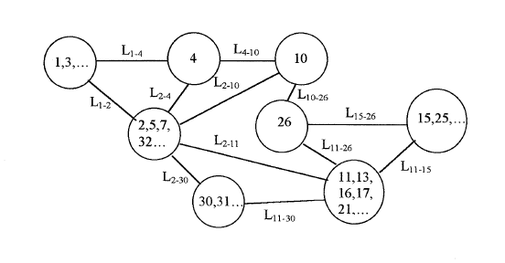
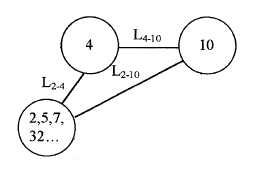
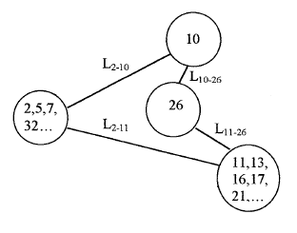
- Le graphe des liaisons du mécanisme ci-contre;
- La liaison L1-2 = Liaison PIVOT d'axe (A, x);
- La liaison L2-30 = Liaison PIVOT d'axe (H, x);
- La liaison L11-15 = Liaison PIVOT d'axe (L, x).
Graphe des liaisons
Travail demandé
1- Analyse du mécanisme
a) Définissez les autres liaisons issues du graphe ci-dessus en justifiant vos réponses (contact entre les pièces, analyse des mouvements relatifs).
b) Déterminez le nombre de cycle indépendant de ce graphe.
c) Proposez un schéma cinématique minimal pour les 3 cycles indépendants suivants, soient:
--> Cycle 1: 2 - 1 - 4
--> Cycle 2: 2 - 4 - 10
--> Cycle 3: 2 - 10 - 26 - 11
2- Vitesse de rotation de l'Arbre Porte-Pince (15)
a) Déterminez la Vitesse de rotation N15/2 avec N1/2 = 12tr/min.
3- Conception
Il s'agit de concevoir 2 liaisons:
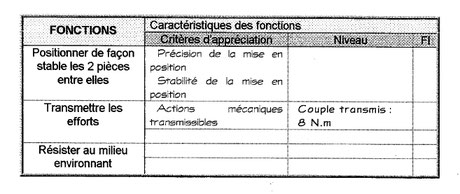
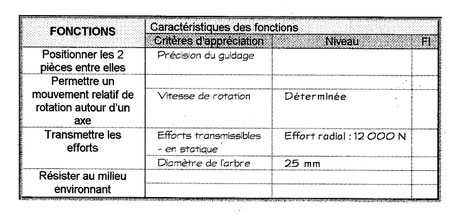
1- Une LIAISON COMPLÈTE entre la Roue dentée (25) et l'Arbre Porte-Pince (15), la transmission des efforts sera faite par obstacle;
2- Une LIAISON PIVOT par COUSSINETS autolubrifiants entre l'Arbre Porte-Pince (15) et le Boitier Porte-Pince (16).
Extrait du cahier des charges
Liaison encastrement:
Liaison pivot:

Remarque:
---> Vous donnerez les CONDITIONS FONCTIONNELLES et les AJUSTEMENTS nécessaires.
---> Établissez une FEUILLE DE CALCUL pour le palier lisse et la clavette éventuelle !
---> Vous établirez une NOMENCLATURE des nouvelles pièces implantées.
4- Ressource
Veuillez trouver ci-dessous quelques pièces (complètes ou partielles) qui répondront certainement à votre modélisation 3D.
Vis CHc, M5-35 (12)

Composant à récupérer via la plateforme de contenu CAO: TRACEPARTS
Cliquez sur l'image !!!
Boitier central (13)

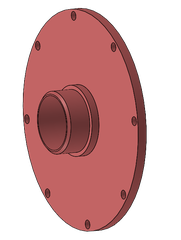
Couvercle gauche (11)
Couvercle droit (17)
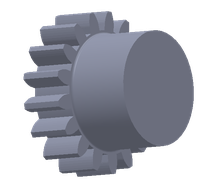
Crémaillère cylindrique (10)

Mise en plan partiel
